平行キネマティックモーション
高精度アクチュエータ

革新的なアクチュエータジョイント

2つの仮想回転中心
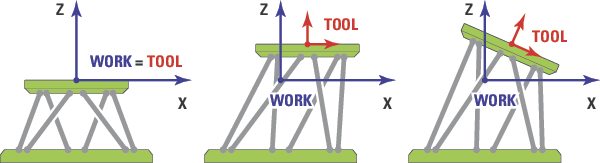
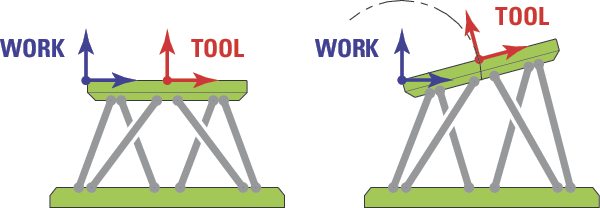
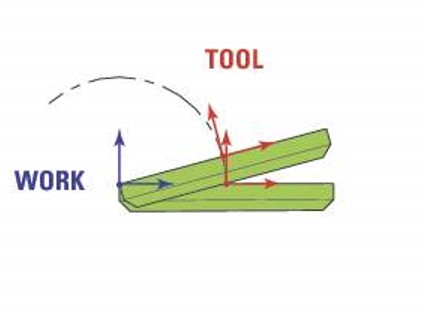
ヘキサポッドのモーションはグローバル座標系とローカル座標系で定義され、標準的な研究、計測、製造のアプリケーションで動作のプログラミングをより直感的に行えるようになりました。ユーザーは、座標系変換を計算したり、コントローラーの電源を切ったりせずに、最大2つの仮想ピボットポイントをプログラムできます。2つの仮想ピボットポイントは、2つの定義可能な座標系の原点です。トッププレートと一緒に移動するツールと、静止した基準であるワークです。 これにより、ユーザーはサンプルとツールの操作方法を概念化することができます。 この6軸デバイスでは、複雑なモーションが単純化され、ユーザープログラムの開発が容易になります。
 | 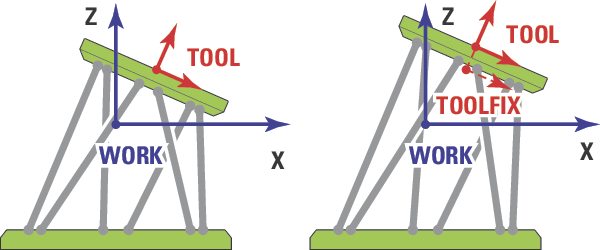 | |
WORK: 共通基準と相対的に定義される TOOL: トッププレートとの関係で定義 |
 |  | |
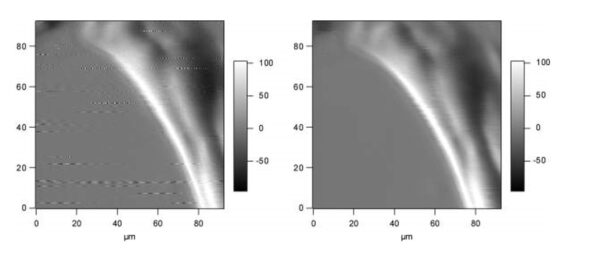
Right Path™軌道制御
平行キネマティックデバイスでは、モーションはヘキサポッドの脚で同期されます。すべての脚が同時にスタートとストップをし、常に同じ部分の軌道を満たします。その結果、World座標系では必ずしも直線的な軌道になりません。小さな動きであれば、この影響は無視できますが、大きな動きでは顕著になります。Newportのエンジニアは、Right Path™ 軌道制御によってヘキサポッドの振れを最小化するソリューションを考案しました。このファームウェアはNewportのヘキサポッド独自の機能で、ワークまたはツールのいずれにおいても、直線( LINER )、円弧( ARC )、回転( ROTATION )の3種類の軌道に沿ったスキャン動作が可能になります。
| LINIER 直線軌道 | ARC 円弧軌道 | ROTATION 回転軌道 | ||
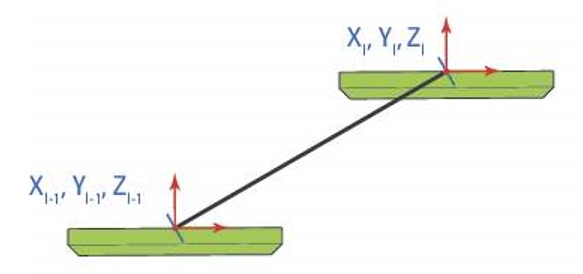 | 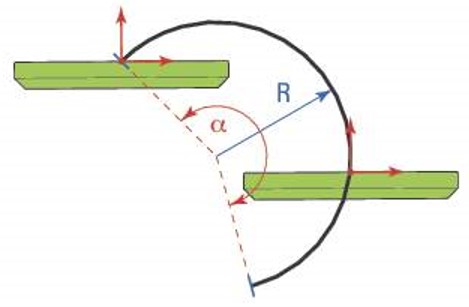 |  | ||
| 線の軌道は、直線セグメントによって定義される軌道です。 | 円弧の軌道は、曲線セグメントによって定義される軌道です。 | 回転軌道は、X,Y,Z軸周りの回転によって定義される軌道です。 |
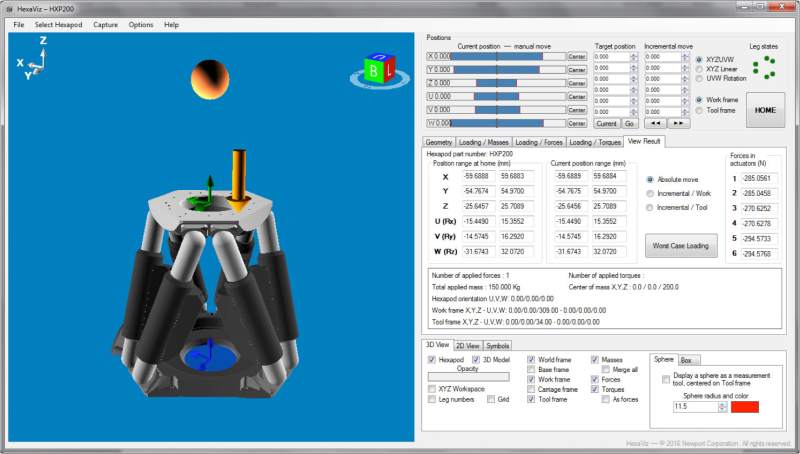
HexaViz シュミレーションソフトウェア
NewportのHexaVizヘキサポッドシミュレーターを使用すると、注文する前に、アプリケーションのニーズに最適なNewport Hexapodモデルを見つけることができます。 Newportの無料のHexaVizヘキサポッドシミュレーションソフトウェアは、移動範囲、負荷容量、力、およびトルク特性を評価するための使いやすい仮想ヘキサポッドインターフェイスを提供します。 詳細については、 HexaVizパンフレットをご覧ください。
ヘキサポッドモーションコントローラー

※ 制御するヘキサポッドと同じプレフィックスを持つコントローラーを選択します。 互換性のあるコントローラについては、別途アクセサリの表を参照してください。
干渉法

ミラーと光学位置決め

光ファイバーまたはデバイスのアライメント

イメージングと顕微鏡検査