スタンドアローン TCSPC USBインターフェイス付 PicoHarp 300
PicoHarp 300
スタンドアローンTCSPCモジュール(USBインターフェイス装備)


同期チャンネルでのディレイ(遅延)調整可能
PicoHarp 300 の同期チャネルには、4 ps の分解能で ±100 ns の範囲の調整可能な内部遅延もあります。 この独自の機能により、さまざまな実験セットアップのために特別に調整されたケーブル長やケーブル遅延の必要がなくなります。
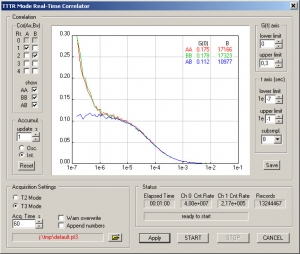
時間タグ付け操作
仕様
| 測定チャンネル | |
|---|---|
| 判別 | 両チャンネルで一定分数弁別器(CFD) Constant Fraction Discriminator (CFD) , ソフトウェアで調整可能 |
| 入力電圧範囲 | 0 ~ -800 mV, 最適: -200 mV ~ -400 mV |
| トリガーポイント | 立下りエッジ |
| トリガーパルス幅 | 0.5 ns ~ 30 ns |
| トリガーパルス 立上がり/立下り時間 | 最大 2 ns |
| デジタル変換への時間 (TDC) | |
| 最大時間ビン幅 | 4 ps |
| タイミング精度* | < 12 ps rms |
| タイミング精度 / √2* | < 8.5 ps rms |
| 同期チャンネル向けディレイ(遅延)調整可能 | ± 100 ns, 分解能 4 ps |
| フルスケール範囲 – ヒストグラムモード | 260 ns ~ 33 μs (選択した分解能に依存: 4, 8, 16, …, 512 ps) |
| フルスケール範囲 – 時間タグ付けモード | 無限 |
| 最大カウント率e | 10×106 カウント/秒 |
| 最大同期率 | 84 MHz |
| デッドタイム | < 95 ns |
| 微分非直線性 | < 5 % ピーク, < 1 % rms |
| ヒストグラマー | |
| カウント深度 | 16 bit |
| 時間ビンの最大数 | 65 536 |
| 取得時間 | 1 ms ~ 100 時間 |
| TTTR エンジン | |
| T2 モード分解能 | 4 ps |
| T3 モード分解能 | 4, 8, 16, …, 512 ps |
| FiFo バッファ深度 (記録) | 262 144 |
| 持続的スループット** | typ. 5×106イベント/秒 |
| 操作 | |
| PC インターフェイス | USB 2.0 高速 |
| PC 要求仕様 | 最小. 1 GHz CPU クロック, 512 MB メモリ |
| OS | Windows™ 7 / 8 (8.1) / 10 |
| 消費電力 | 25 W (100 ~ 240 VAC) |
*タイミング精度を決定するためには、時間差を繰り返し測定し、その測定値の標準偏差(rmsエラー)を計算する必要があります。これは、パルス発生器からの電気信号を分割し、2つの信号をそれぞれ別の入力チャンネルに供給することで行われます。測定されたパルス到達時間の差と、それに対応する標準偏差が計算されます。後者の値は、タイミング精度を指定するために使用するrmsジッターです。しかし、このような時間差を計算するには、2回の時間測定が必要です。そこで、誤差伝搬の法則に従い、先に算出した標準偏差を√2で割ることで、単一チャンネルのrms エラーを求めます。他社製品との比較のために、ここではこの単一チャンネルrms エラーも明記しています。
** 持続的スループットは、ホストPCの構成と性能に依存します。
アプリケーション
- 時間分解蛍光
- 蛍光寿命イメージング (FLIM)
- 蓄光寿命イメージング (PLIM)
- 蛍光相関分光法 (FCS)
- 蛍光寿命相関分光法 (FLCS)
- 蛍光共鳴エネルギー移動 (FRET)
- 誘導放出抑制顕微鏡法 (STED)
- デュアル フォーカス蛍光相関分光法 (2fFCS)
- パルス インターリーブ励起 (PIE)
- 蛍光異方性 (偏光)
- 一重項酸素
- 時間分解フォトルミネッセンス (TRPL)
- 単分子分光法 / 検出TRPLイメージング
- ランタニドのアップコンバージョン
- 束の純度
- LIDAR/測距/SLR
- アンチバンチング
- 一致相関関係
- 量子通信
- 量子もつれ
- 量子テレポーテーション
- 量子情報処理
- 陽電子消滅寿命分光法 (PALS)
- 光電子デバイスの時間応答特性評価
- トーマス・ボリンジャー単光子法
データシート関連







✕